
普段は使うことの少ないAVRマイコン(ATMega328PB)のADC(A/Dコンバータ)を使ってみました。コンパイラはいつものBASCOMで、割り込み処理の多いプログラムです。試しに処理時間を測定してみたところ意外にも処理時間が長い。アセンブラで書き直せば早いと思うのですが、それも面倒。こちらが1chを1回だけの処理時間です。
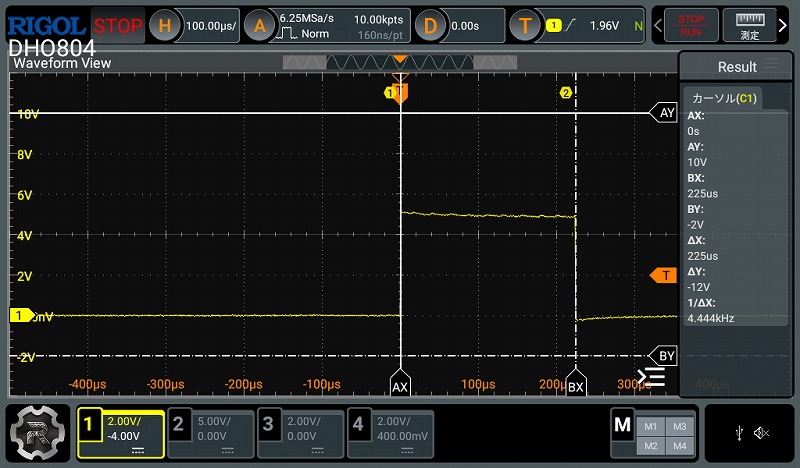
225uSec要しています。(時間の測定は空きポートをハイ/ローさせて測定しています。)割り込み処理の間隔が200uSec以下なので、これは少々長くて具合が悪い。そこで、ADCをSPIインターフェースのMCP3208にして測ってみました。データのやり取りはSPIではなく、SHIFTIN 命令での処理です。
' MCP3208で2チャンネルのADC読み取り
For Ch = 0 To 1
Reset Cs ' CSをLowにして開始
'=== コマンド送信 ===
' MCP3208: Start bit=1, SGL=1(Diff=0), D2,D1,D0, nullビット
Txsout = &B00011000 Or Ch 'ch=0 to 5
'data-port,clock-port,var,mode (mode=1 clock is up-edge, msb to lsb )
Shiftout Mosi , Sck , Txsout , 1 ' Start + SGL + D2,D1,D0
'=== データ受信(12bit) ===
Shiftin Miso , Sck , Dummy , 1 , 2 ' receive 2-bit (空読み)
Shiftin Miso , Sck , Byteh , 1 , 4 ' receive 4-bit (上位4bit)
Shiftin Miso , Sck , Bytel , 1 , 8 ' receive 8-bit (下位8bit)
Set Cs ' CSをHighにして通信終了
Byteh = Byteh And &B00001111
Adc_value(ch) = Makeint(bytel , Byteh) ' 上位4bitと下位8bitをword型に結合して代入
Next Ch

早いです。31.6uSecでした。ということで、やはりADCは外付けにします。
最近、9年使ったテクシオのオシロスコープ GW-INSTEK GDS-1074Bが壊れました。修理料金の見積もりを取ったところ、定額で45,000円(税別)とのことだったので、10万円で購入して9年使ったものに5万はなぁ・・と、買い換えることに。いくつかの候補を検討の結果、RIGOLのDHO804を購入。電源を入れてからの起動時間が結構掛かるのが難点ですが、普段使いには十分な性能です。VESAマウント対応なのでディスプレイ用のアームに取り付けて使っています。